
В отличие от метода сопротивления, метод напряжения предполагает изменение управляющего напряжения во время фазы управления для контроля перенапряжения и тока. Существует примерно два способа изменения управляющего напряжения . Один из них — добиться изменения путем деления управляющего напряжения через резистор, а другой — изменить выходной сигнал в микросхеме управления (DSPFPGA), а затем преобразовать его в аналоговый сигнал через цифро-аналоговый чип для изменения управляющего сигнала. Напряжение. Принципиальная схема управления процессом включения методом напряжения представлена на рисунке 2, а экспериментальная форма сигнала - на рисунке.

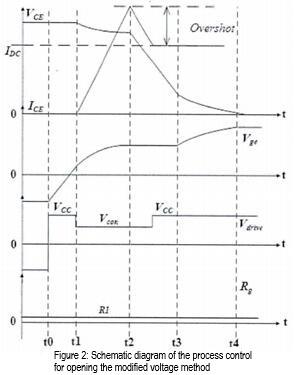
Метод управления процессом открытия методом напряжения и методом сопротивления в основном одинаков. Стадия управления та же, начиная с подъема ДВС и заканчивая обратным током восстановления обратного диода верхнего транзистора.
Однако метод напряжения заключается в замене управляющего резистора.
Принципиальная схема управления процессом отключения методом напряжения представлена на рисунке 4, а экспериментальная форма сигнала - на рисунке 3.
Рисунок 3: Экспериментальная форма сигнала процесса переключения с использованием модифицированного метода напряжения (переключение привода от -10 В до 2,5 В)
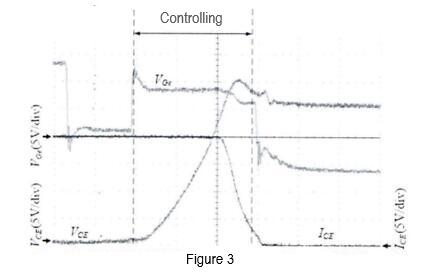
Рисунок 4 Принципиальная схема управления процессом останова методом напряжения
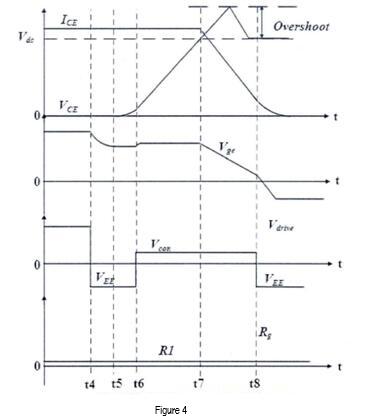
Как и метод сопротивления, метод напряжения также контролируется от повышения VCE во время процесса отключения до тех пор, пока ДВС не упадет почти до нуля и не прекратит управление.
Преимущества перехода от метода напряжения к многоступенчатому управлению подробно обсуждались ранее, а их недостатки аналогичны изменению метода сопротивления. Ниже приведены недостатки:
1: Существует два существующих метода изменения управляющего напряжения во время фазы управления: один — изменить управляющее напряжение путем переключения резистора делителя напряжения через переключатель (MOSFET); Другой метод — изменить управляющее напряжение через цифро-аналоговый чип. Первый имеет ту же проблему, что и метод управления напряжением, при котором трудно изолировать сигнал управляющего переключателя от силовой цепи, и на сигнал легко влияет шум силовой цепи. Последний имеет проблему увеличения стоимости и сложности схемы ЦАП, одновременно увеличивая задержку схемы управления и
влияя на управление с обратной связью.
Второй момент заключается в том, что управления по обратной связи в процессе активации добиться сложно, так же, как и при изменении метода сопротивления, управление необходимо начинать с момента, когда ДВС начнет подниматься. В противном случае возникнут две ситуации: 1. Если напряжение управления высокое, как и при изменении метода сопротивления, перерегулирование ДВС будет выше. Если напряжение управления низкое, это приведет к уменьшению мощности ДВС и даже к ошибочному отключению IGBT. Анализ конкретных причин:
Эквивалентная модель схемы управления IGBT на этом этапе аналогична эквивалентной модели при анализе недостатков модифицированного метода сопротивления, как показано на рисунке 2.20. Из-за небольшого размера Rg Ig значительно крупнее
IgC. Поэтому при анализе дефектов модифицированным вольтажным методом влияние IgC можно не учитывать. Это упрощает эквивалентную модель и требует только схемы управления. В связи с малым Rg необходимо учитывать
наличие паразитной индуктивности Lg в цепи управления. Упрощенная модель представлена на рисунке 5.
Рисунок 5 Упрощенная модель этапа управления процессом открытия метода напряжения
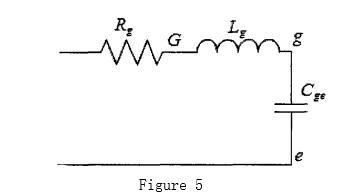
Если управляющее напряжение при управлении велико, то потребуется время (приблизительно десятки нс) для уменьшения Ig из-за наличия паразитной индуктивности Lg в цепи управления. На этом этапе Vge по-прежнему будет расти более быстрыми темпами, поэтому невозможно уменьшить перерегулирование ICE до очень низкого уровня. Если вы хотите контролировать очень низкое перерегулирование ДВС, вам необходимо очень сильно снизить напряжение управления, даже ниже текущего Vge. Это приведет к падению ДВС и даже к ложному отключению, что повлияет на нормальную работу IGBT. Чтобы IGBT работал нормально, управляющее напряжение во время фазы управления должно быть как минимум больше, чем Vge до управления, что предотвратит снижение перерегулирования ICE до более низкого уровня. Поэтому при проектировании схемы все равно необходимо оставить большой запас по току IGBT.
Третий момент заключается в том, что во время фазы управления трудно изменить управляющее напряжение Vcom, и различные эффекты управления (различные выбросы напряжения и тока) не могут быть достигнуты. В некоторой литературе предлагается метод добавления микросхем ЦАП в цифровые схемы управления для изменения Vcom. Однако это не только увеличивает стоимость, но и увеличивает задержку контура управления, что может привести к неточному или даже неэффективному управлению. Его нельзя считать хорошим методом и нельзя использовать в практических приложениях.
Категории
недавний посты








Сканировать в WeChat:everexceed















